
Γράφει ο Ηρακλής Μαρδύρης
Στο πρώτο άρθρο της σειράς είχαμε κάνει μια εισαγωγή στη μοντέρνα χρήση των υποβρυχίων και στον ανθυποβρυχιακό πόλεμο, στο δεύτερο συνεχίσαμε με το σόναρ και τους ηχοσημαντήρες, στο τρίτο με τον Παθητικό Εντοπισμό υποβρυχίων και στο τέταρτο με την πρακτική χρήση ηχοσημαντήρων.
Ανθυποβρυχιακός Πόλεμος – Παθητικός Εντοπισμός: SE=SL–AN–PL+DI
Σε αυτό το άρθρο θα ασχοληθούμε με τα ενεργητικά σόναρ.
Επιπλέων των παθητικών τρόπων εντοπισμού του θορύβου που παράγει ένα υποβρύχιο, που αναφέρθηκαν σε προηγούμενα άρθρα, τα πλοία μπορούν να φέρουν ενεργητικά σόναρ. Αυτά δημιουργούν έναν παλμό ήχου, που συχνά ονομάζεται “ping” και, στη συνέχεια, αναλύει τις ανακλάσεις (ηχώ) του παλμού. Αυτός ο παλμός ήχου δημιουργείται ηλεκτρονικά από μια γεννήτρια σήματος, έναν ενισχυτή και έναν ηλεκτροακουστικό μετατροπέα.
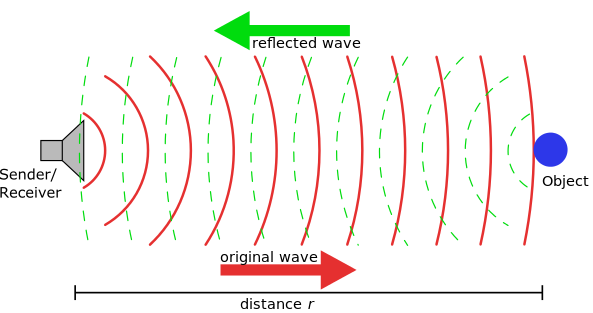
Ένας διαμορφωτής δέσμης χρησιμοποιείται συνήθως για τη συγκέντρωση της ακουστικής ισχύος σε μια δέσμη, η οποία μπορεί να σαρώνεται για να καλύψει την απαιτούμενη γωνία αναζήτησης. Για τη μέτρηση της απόστασης από τον στόχο, ο χρόνος από τη μετάδοση ενός παλμού έως τη λήψη μετράται και υπολογίζεται η απόσταση χρησιμοποιώντας τη γνωστή ταχύτητα του ήχου στη θάλασσα. Όταν ο πομπός και ο δέκτης του σήματος είναι στο ίδιο μέρος, τότε είναι μονοστατικό σόναρ. Αν είναι σε διαφορετικά μέρη, είναι διστατικό και αν γίνεται χρήση πολλών πομπών και δεκτών, τότε το σύστημα είναι πολυστατικό.
Τα αεροσκάφη μπορούν να χρησιμοποιήσουν και ενεργούς ηχοσημαντήρες. Αυτοί όμως σε αντίθεση με τα ενεργά σόναρ που φέρουν τα πλοία δεν έχουν στη διάθεση τους τόσο πολύ ισχύ, οπότε ο ρόλος τους περιορίζεται κυρίως στις τελευταίες φάσεις του εντοπισμού, της παρακολούθησης και της εμπλοκής.
Η εξίσωση για τα ενεργητικά σόναρ είναι:
EL = SL – 2TL + TS – (NL – DI) / DT
EL (dB) = Energy Level. H ενέργεια του σήματος που επιστρέφει
SL (dB) = Source Level. Η ενέργεια του ping που εκπέμπεται
TL (dB) = Transmission Loss. Η απώλεια της μετάδοσης σήματος από την πηγή στον δέκτη (για αυτό διπλασιάζεται), απορρόφηση, αντανάκλαση σήματος.
TS (dB) = Target Strength. Έχει να κάνει με το πόσο αντανακλά ο στόχος το σήμα και έχει σχέση με το σχήμα και τον τρόπο κατασκευής του υποβρυχίου, τα υλικά και την ύπαρξη ειδικής επικάλυψης. Το μικρό μέγεθος των υποβρυχίων έχει επίσης και μία άμεση συσχέτιση με το πόσο αντανακλά το σήμα. Όσο πιο μικρό είναι το υποβρύχιο, τόσο λιγότερο σήμα αντανακλά.
NL (dB) = Noise Level. Ο θόρυβος του περιβάλλοντος
DI (dB) = Directivity Index. Είναι το αντίστοιχο της ενίσχυσης της κεραίας του ραντάρ.
DT (dB) = Detection Threshhold. Η ισχύς ενός σήματος ικανού ώστε ένας έμπειρος χειριστής να μπορεί να εντοπίσει ένα υποβρύχιο κατά 50%.
Tα diesel υποβρύχια που δρουν σε παράκτιες περιοχές μπορούν να εκμεταλλευτούν την τοπογραφία του βυθού και τις περιοχές όπου ευνοούν την αντήχηση, η οποία θα μπερδέψει το σόναρ. Αυτοί οι περιορισμοί είναι φυσικά γνωστοί και λαμβάνονται υπ’ όψιν κατά το σχεδιασμό των ανθυποβρυχιακών επιχειρήσεων, τόσο από τα πλοία, όσο και από τα αεροσκάφη. Τα ανθυποβρυχιακά μέσα αποκτούν όλο και καλύτερους επεξεργαστές σήματος και τεχνητή νοημοσύνη και γίνεται συνεχώς έρευνα για νέες μεθόδους εντοπισμού υποβρυχίων.
Στα τέλη της δεκαετίας το 90 κάποια κράτη πειραματιστήκανε με τη δυνατότητα έρευνας μεγάλης περιοχής χρησιμοποιώντας ηχοσημαντήρες οι οποίοι έφεραν μια μικρή εκρηκτική συσκευή και μιας παθητικής συστοιχία που λάμβανε. Αυτή η μεθοδολογία έχει κάποια χρήση εναντίων πυρηνικών υποβρυχίων που δρουν σε μεγάλα βάθη στον ωκεανό, αλλά είναι μάλλον ακατάλληλη για τον εντοπισμό υποβρυχίων diesel που δρουν σε παράκτιες περιοχές και σε μικρότερα βάθη. Μια νέα τεχνολογία ήταν απαραίτητη και για αυτό πολλά ναυτικά στράφηκαν στα πολυστατικά συστήματα.
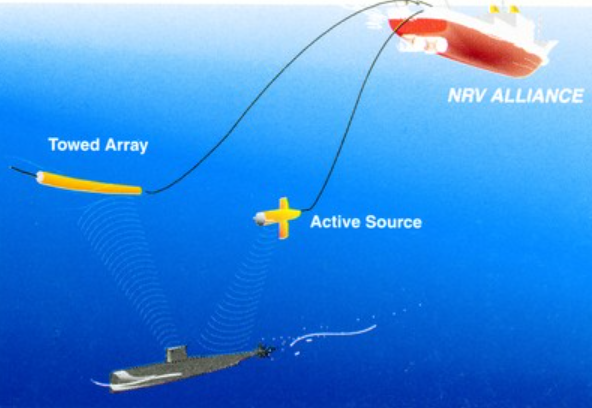
Ένα πολυστατικό σύστημα σόναρ αποτελείται από έναν συνδυασμό αισθητήρων σόναρ (ενεργητικούς και παθητικούς) τοποθετημένους σε διαφορετικές τοποθεσίες. Δεδομένου ότι ο τύπος των πλατφορμών και οι αριθμοί τους είναι μεταβλητοί, οι διαμορφώσεις είναι πολλαπλές. Ένα πολυστατικό σύστημα σόναρ περιλαμβάνει συνήθως ένα ενεργό σόναρ χαμηλών συχνοτήτων (Low-Frequency Active Sonar – LFAS) που μπορεί να είναι τοποθετημένο σε κύτος πλοίου ή ρυμουλκούμενο από πλοίο ή μη επανδρωμένο), μια παθητική συστοιχία που ρυμουλκείται από άλλο πλοίο ή ένα αυτόνομο υποβρύχιο όχημα (Autonomous Underwater Vehicle – AUV), μια σειρά από ηχοσημαντήρες και μια άλλη σειρά από αγκυροβολημένα υδρόφωνα, που σχηματίζουν όλα αυτά μαζί ένα δίκτυο αισθητήρων. Υπάρχουν πολλά πλεονεκτήματα του πολυστατικού συστήματος σε σχέση με τη μονοστατική λύση όπως εξαιρετική τριγωνομέτρηση της θέσης του στόχου και της παρακολούθησής του, εκτεταμένη εμβέλεια και απόκρυψη του πλοίου από το υποβρύχιο καθώς το υποβρύχιο ναι μεν θα μπορεί να εντοπίσει την πηγή του ping, αλλά αυτή η πηγή κατά βάση δεν θα προέρχεται από κάποιον από τους κυνηγούς του, οπότε οι ελιγμοί διαφυγής του θα είναι περισσότερο βασισμένοι στην τύχη.

Τα πολυστατικά συστήματα είχανε κάνει την εμφάνιση τους από τη δεκαετία του 50, αλλά η πραγματική αναγέννηση τους έγινε τη δεκαετία του 90, με την ανάπτυξη της ψηφιακής τεχνολογίας, της ψηφιακής επεξεργασίας σήματος, και των επικοινωνιών και δικτύων, τόσο εναέριων όσο και υποθαλάσσιων. Πολλές πτυχές τους είναι απόρρητες, αλλά σύμφωνα με δημοσιεύσεις του ΝΑΤΟ, τα πολυστατικά συστήματα είναι είναι τα πιο αποτελεσματικά στον εντοπισμό εχθρικών υποβρυχίων.

Το ενδιαφέρον είναι ότι ένα ναυτικό μπορεί να στήσει ένα πολυστατικό σύστημα χωρίς να χρειαστεί να επενδύσει σε (πολλές) ακριβές φρεγάτες ανθυποβρυχιακού πολέμου. Σε αρχιπελαγικό περιβάλλον, που οι αποστάσεις μεταξύ των νησιών είναι μικρές, το κέντρο επιχειρήσεων μπορεί να είναι στη ξηρά ή σε ένα αεροσκάφος ναυτικής συνεργασίας και όχι πάνω σε πλοίο. Οι αισθητήρες είναι έτσι και αλλιώς διασκορπισμένοι και το ενεργό σόναρ μπορεί να φέρεται από μικρότερο σκάφος ή σκάφη ή μη επανδρωμένο όχημα. Όταν εντοπιστεί το υποβρύχιο, τότε αεροπλάνα ή ελικόπτερα ή ταχύπλοα με τορπίλες θα του επιτεθούν χωρίς να θέσουν σε κίνδυνο μια ακριβή και πολύτιμη μονάδα του στόλου που θα είναι πάντα εκτός της εμβέλειας των όπλων του υποβρυχίου.
Η δεύτερη καλύτερη λύση είναι τα συρόμενα από πλοία Active Towed Array Sonar (ACTAS). Τη δεκαετία του 80 παρουσιάστηκε αυτό το σύστημα σόναρ που αποτελείται από μια παθητική συρόμενη συστοιχία και μια ενεργή πηγή ήχου, που σε αντίθεση όμως με ένα διστατικό σόναρ, σύρεται από μία μόνο πλατφόρμα. Καθώς ο απώτερος στόχος του νέου συστήματος ήταν να βελτιώσει την ικανότητα ανίχνευσης των νέων πολύ πιο αθόρυβων υποβρυχίων που τέθηκαν σε λειτουργία τότε, η πηγή ήχου εκπέμπει σήμα χαμηλής συχνότητας (λιγότερο από 1 kHz), το οποίο απαιτεί μια σχετικά υψηλή ισχύ εισόδου στο σύστημα. Η έμφαση δόθηκε στο πάντα δύσκολο πρόβλημα ανίχνευσης υποβρυχίων σε ρηχά νερά. Το 1981 παρουσιάστηκε στα έθνη του ΝΑΤΟ που του έδωσαν το πράσινο φως. Μέχρι το 1984 πραγματοποιήθηκαν επτά δοκιμές στη Μεσόγειο σε διάφορες εποχές σε βαθιά και ρηχά νερά με καλά αποτελέσματα, καθώς το σύστημα αυξάνει σαφώς το εύρος ανίχνευσης έναντι είτε προσομοιωμένων είτε πραγματικών στόχων – δηλαδή πραγματικών υποβρυχίων. Περαιτέρω απόδειξη της ιδέας επιτεύχθηκε τα επόμενα χρόνια σε δοκιμές που πραγματοποιήθηκαν σε άλλα νερά όπως η Μάγχη και η Βόρεια Θάλασσα.
Ένας περιορισμός στη χρήση ενεργητικών σόναρ είναι η αδυναμία τους να κατηγοριοποιήσουν την επιστροφή του ήχου. Τα παθητικά συστήματα ακούνε τον παραγόμενο ήχο και μπορούν να αναγνωρίσουν τον στόχο, τύπο υποβρυχίου και σε ορισμένες περιπτώσεις και το ποιο υποβρύχιο είναι. Έμπειροι χειριστές ενεργητικού σόναρ μπορεί να είναι σε θέση να εκτιμήσουν το μέγεθος του υποβρυχίου, αλλά ακόμα όχι τον τύπο του ή αν είναι φίλιο ή εχθρικό. Αυτός είναι ένας τομέας, που μαζί με τα πολυστατικά συστήματα απορροφά πολλά κονδύλια ερευνών.
Η χρήση των ενεργητικών σόναρ έχει επιπτώσεις στα θαλάσσια θηλαστικά. Όλες οι ναυτικές δυνάμεις του ΝΑΤΟ πρέπει να ακολουθούν αυστηρές οδηγίες και να υπολογίζουν αυτόν τον παράγοντα στη σχεδίαση των εκπαιδευτικών ανθυποβρυχιακών επιχειρήσεων.
Ένας ακόμα περιορισμός είναι οι ηλεκτρομαγνητικές παρεμβολές. Οι σημερινοί ηχοσημαντήρες μεταφέρουν το ακουστικό σήμα στο αεροσκάφος μέσω VHF. Σε περιοχές επιχειρήσεων κοντά στη ξηρά, όπως στην Μεσόγειο, οι ηλεκρομαγνητικές παρεμβολές μπορεί να είναι σημαντικές, ειδικά αν το αεροσκάφος επιχειρεί σε μεγάλα υψόμετρα. Έρευνα γίνεται ώστε να κρυπτογραφείται το σήμα των ηχοσημαντήρων και ώστε να χρησιμοποιηθούν άλλες συχνότητες.
Συνοψίζοντας, τα πολυστατικά συστήματα προσφέρουν τις μεγαλύτερες πιθανότητες εντοπισμού εχθρικών υποβρυχίων. Για συστήματα που φέρονται από ένα πλοίο, τις περισσότερες πιθανότητες και μεγαλύτερη εμβέλεια (με διαφορά) προσφέρουν τα συρόμενα ACTAS χαμηλής συχνότητας, κατόπιν τα παθητικά συρόμενα Towed Arrays και η τελευταία επιλογή είναι το σόναρ γάστρας που προσφέρει τη λιγότερη εμβέλεια, είναι τυφλό στο πίσω μέρος του πλοίου και είναι σχεδόν αδύνατον να εντοπίσει υποβρύχιο που βρίσκεται κάτω από θερμοκλινές, γιατί το τελευταίο αντανακλά το σήμα του.

ASO (Hull Mounted Sonar), Σόναρ Γάστρας
TASO (Passive Towed Array and Hull-Mounted Sonar), Παθητικό Towed Array και Σόναρ Γάστρας
ACTAS (Active Towed Array Sonar)